Week9 机器人与机器视觉
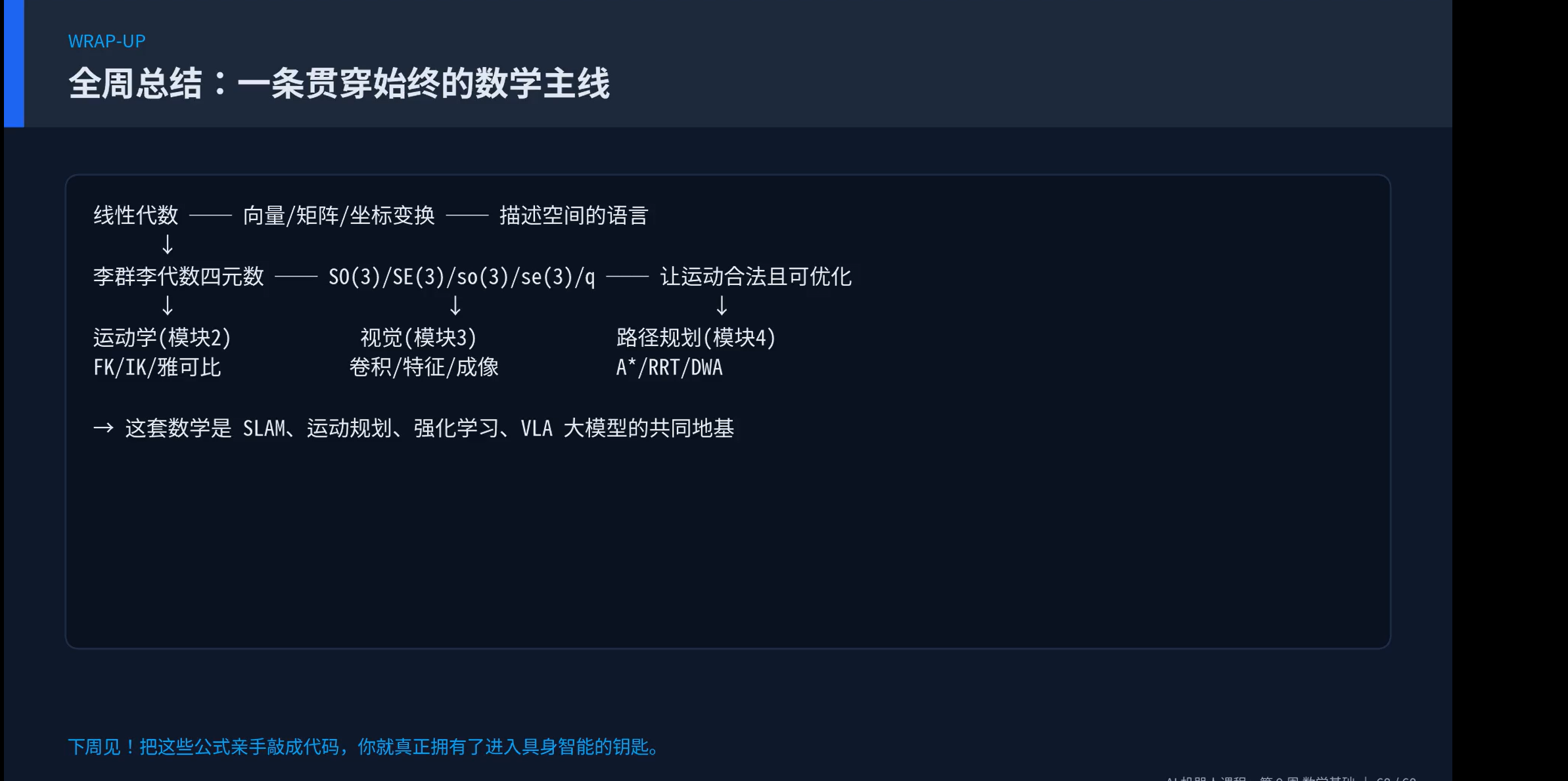
线性代数+具有智能基石
向量/矩阵/坐标变换.SO(3)/SE(3)/四元数
机器人要在三维物理世界里运动
位置、姿态、速度、力——全部是数学对象
感知:相机/激光把世界变成矩阵与点云
卷积、梯度、投影都是线性代数运算
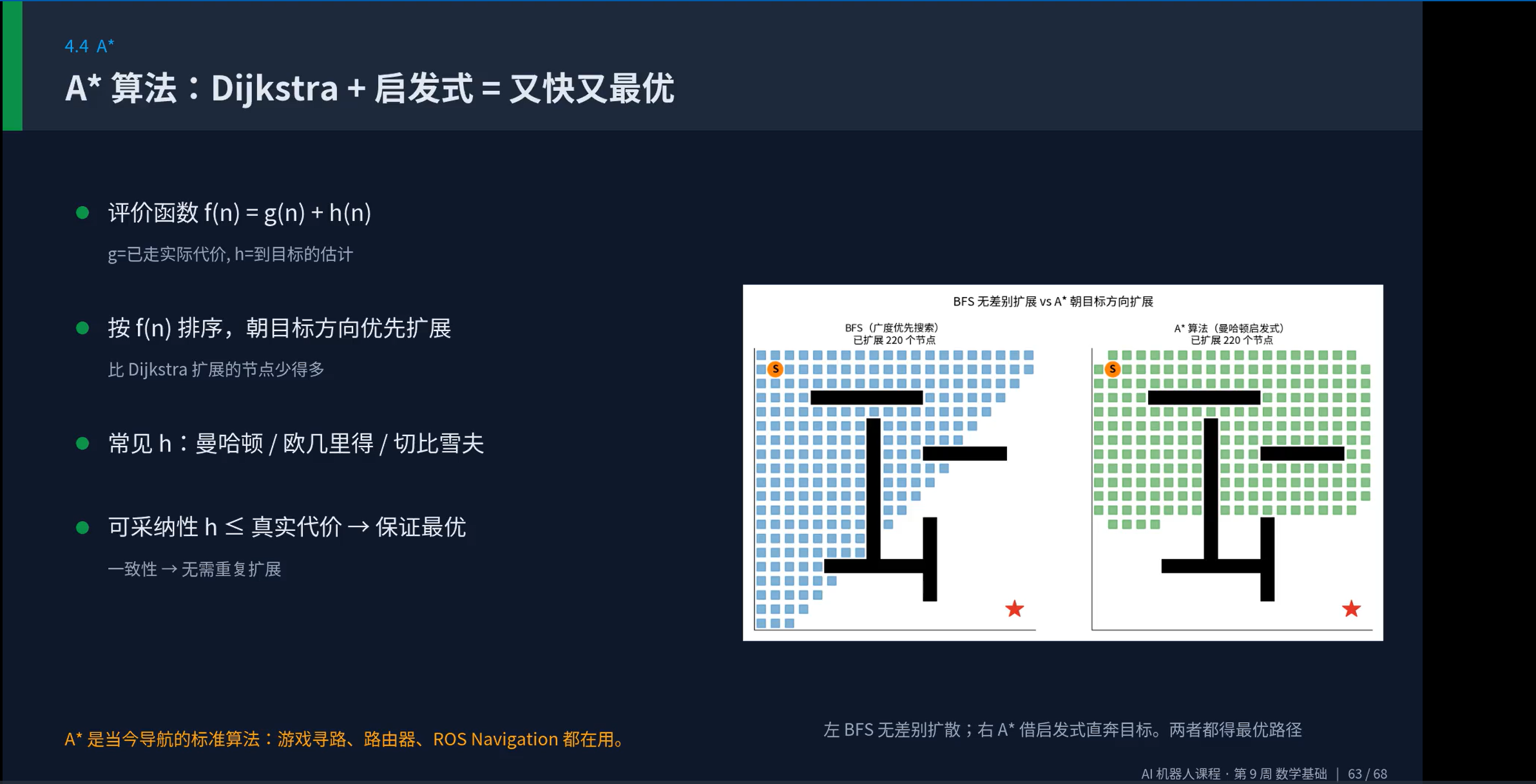
决策:从A到B怎么走
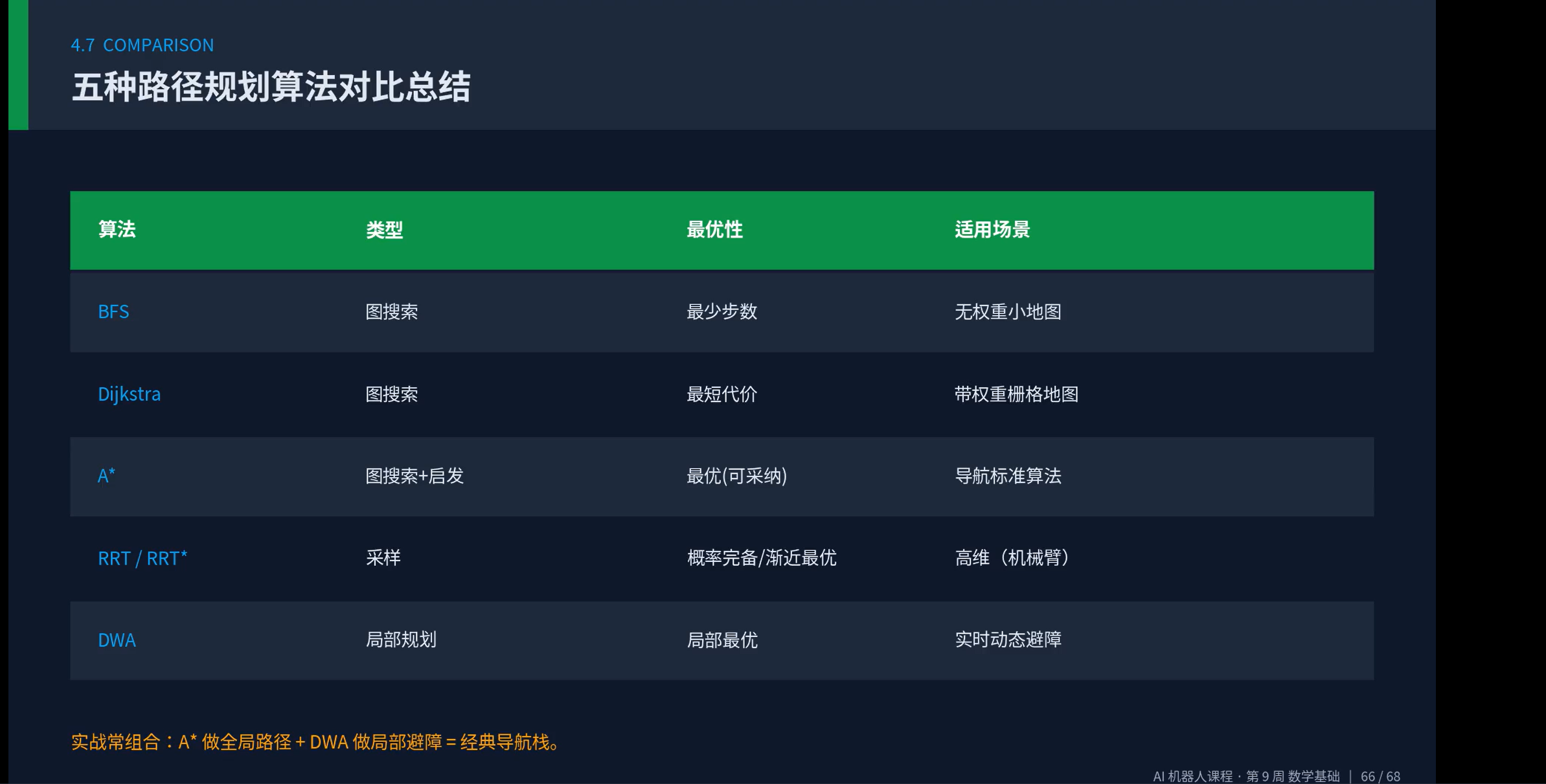
路径规划=图搜索+采样+优化
控制:让动作物理上合法、可微、可优化
向量与坐标系:描述空间的最小单位
向量=既有大小又有方向的量
机器人里:位置、速度、力、角速度都是向量
坐标系=度量世界的参照框架
世界系/机体系/相机系/关节系
同一个点,在不同坐标系下数值不同
坐标变换的本质就是“换参照系”
向量运算是后面一切的基础
点积、叉积、模长、线性组合
机器人运动学数学
正运动学.逆运动学.雅可比矩阵
逆运动学:已知末端位置,求关节角
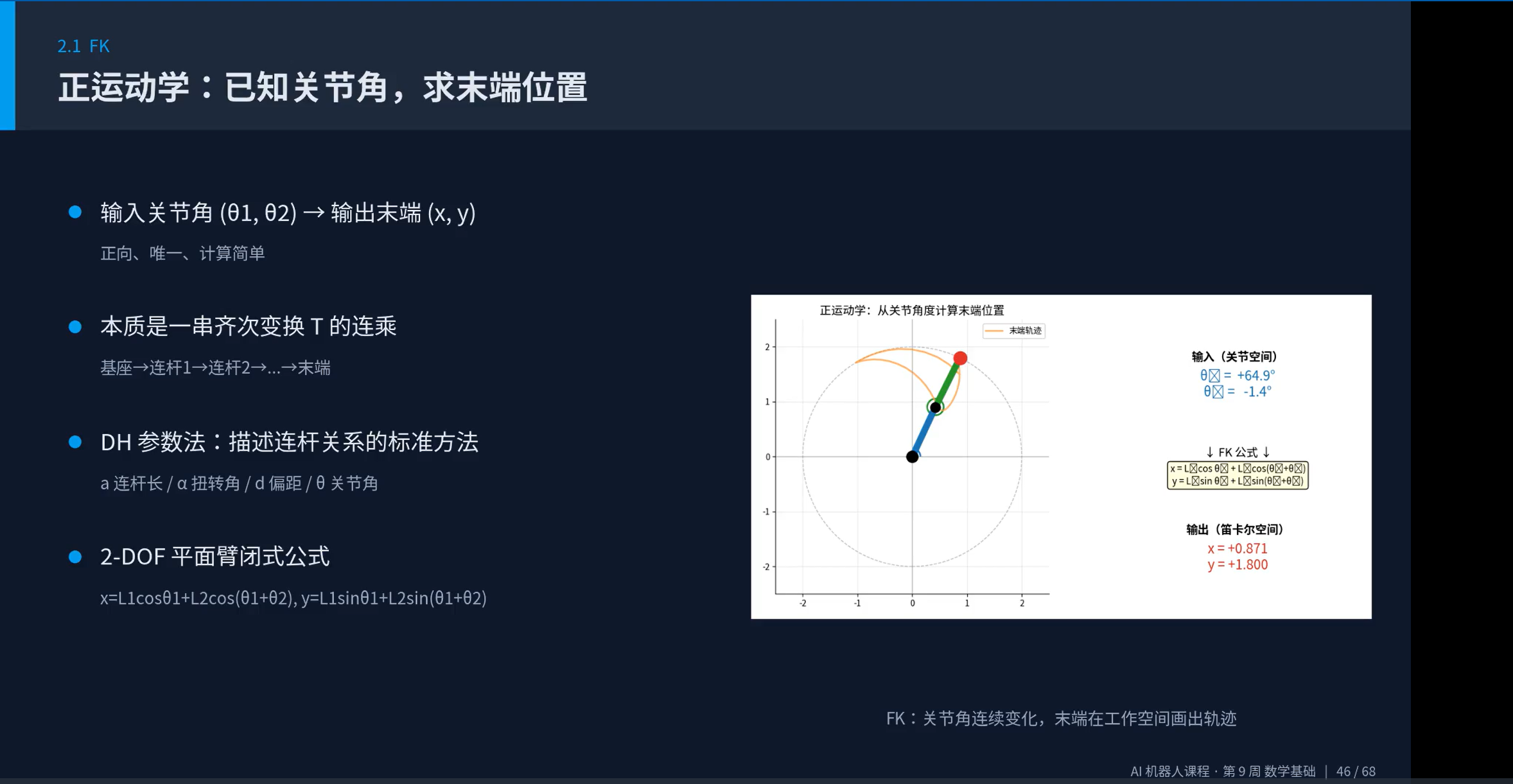
输入末端(x,y)→输出关节角(01,02)
反向求解,是控制机械臂的关键
可能有多个解
手肘向上/手肘向下
可能无解
目标超出工作空间
可能有无穷多解
冗余机械臂 自由度>任务维度
计算机视觉数学
图像表示.卷积.特征提取.相机成像
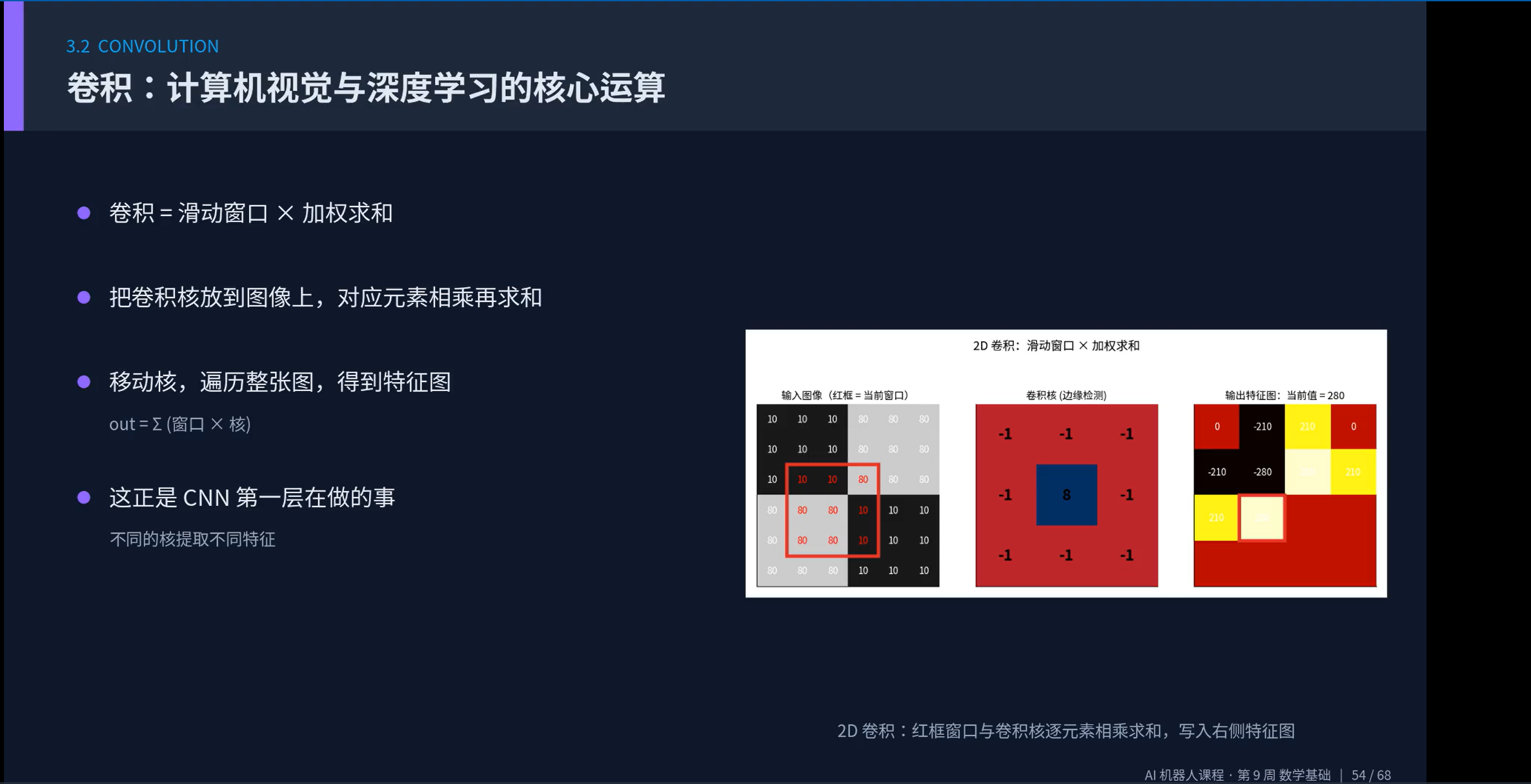
卷积:计算机视觉与深度学习的核心运算
卷积=滑动窗口×加权求和
把卷积核放到图像上,对应元素相乘再求和。移动核,遍历整张图,得到特征图out=工(窗口×核)
这正是CNN第一层在做的事
不同的核提取不同特征
路径规则算法
BFS.Dijka.A*.RRT.DWA
BFS广度优先搜索:所有图搜索的起点
核心思想:像水波纹一样从起点向外一层层扩散
先到达的就是最短路径(按步数)
用“队列”:取队头、把未访问邻居加队尾
先进先出=按距离分层
优点:简单,保证最少步数的最短路径
缺点:每条边权重都当作1,无法处理地形成本
缺点:大地图慢,搜索空间大
 总结:
总结: