week4 机器人运动学基础(二维)
小乌龟走正方形原理
#!/usr/bin/env python3 “”” 让小乌龟走正方形的控制脚本 “””
import rclpy from rclpy.node import Node from geometry_msgs.msg import Twist import time
class SquareMover(Node): “"”走正方形的控制节点”””
def __init__(self):
super().__init__('square_mover')
# 创建发布者
self.cmd_vel_pub = self.create_publisher(
Twist,
'/turtle1/cmd_vel',
10
)
# ============ 参数设置 ============
self.SPEED = 1.0 # 线速度 m/s
self.TURN_SPEED = 1.0 # 角速度 rad/s
self.SIDE_LENGTH = 2.0 # 边长 m
# 计算运动时间
self.MOVE_TIME = self.SIDE_LENGTH / self.SPEED
self.TURN_TIME = 1.5708 / self.TURN_SPEED # 90° = π/2
self.get_logger().info('🎯 正方形控制节点启动!')
self.get_logger().info(f'📐 边长: {self.SIDE_LENGTH}m, 速度: {self.SPEED}m/s')
def move_straight(self, duration):
"""直行指定时间"""
self.get_logger().info('→ 直行...')
msg = Twist()
msg.linear.x = float(self.SPEED)
msg.angular.z = 0.0
# 记录开始时间
start_time = self.get_clock().now()
# 持续发布命令
while (self.get_clock().now() - start_time).nanoseconds < duration * 1e9:
self.cmd_vel_pub.publish(msg)
time.sleep(0.01)
# 停止
self.stop()
self.get_logger().info('✓ 直行完成')
def turn(self, duration):
"""旋转指定时间"""
self.get_logger().info('↻ 旋转...')
msg = Twist()
msg.linear.x = 0.0
msg.angular.z = float(self.TURN_SPEED)
start_time = self.get_clock().now()
while (self.get_clock().now() - start_time).nanoseconds < duration * 1e9:
self.cmd_vel_pub.publish(msg)
time.sleep(0.01)
self.stop()
self.get_logger().info('✓ 旋转完成')
def stop(self):
"""停止运动"""
msg = Twist()
msg.linear.x = 0.0
msg.angular.z = 0.0
self.cmd_vel_pub.publish(msg)
time.sleep(0.1)
def move_square(self):
"""执行走正方形"""
self.get_logger().info('🏁 开始走正方形!')
for i in range(4):
self.get_logger().info(f'━━━ 第 {i+1}/4 条边 ━━━')
self.move_straight(self.MOVE_TIME)
self.get_logger().info(f'━━━ 第 {i+1}/4 次转弯 ━━━')
self.turn(self.TURN_TIME)
self.get_logger().info('🎉 正方形走完!回到起点!')
def main(args=None): rclpy.init(args=args) node = SquareMover()
# 给系统一点准备时间
time.sleep(1)
# 执行走正方形
node.move_square()
node.destroy_node()
rclpy.shutdown() if __name__ == '__main__':
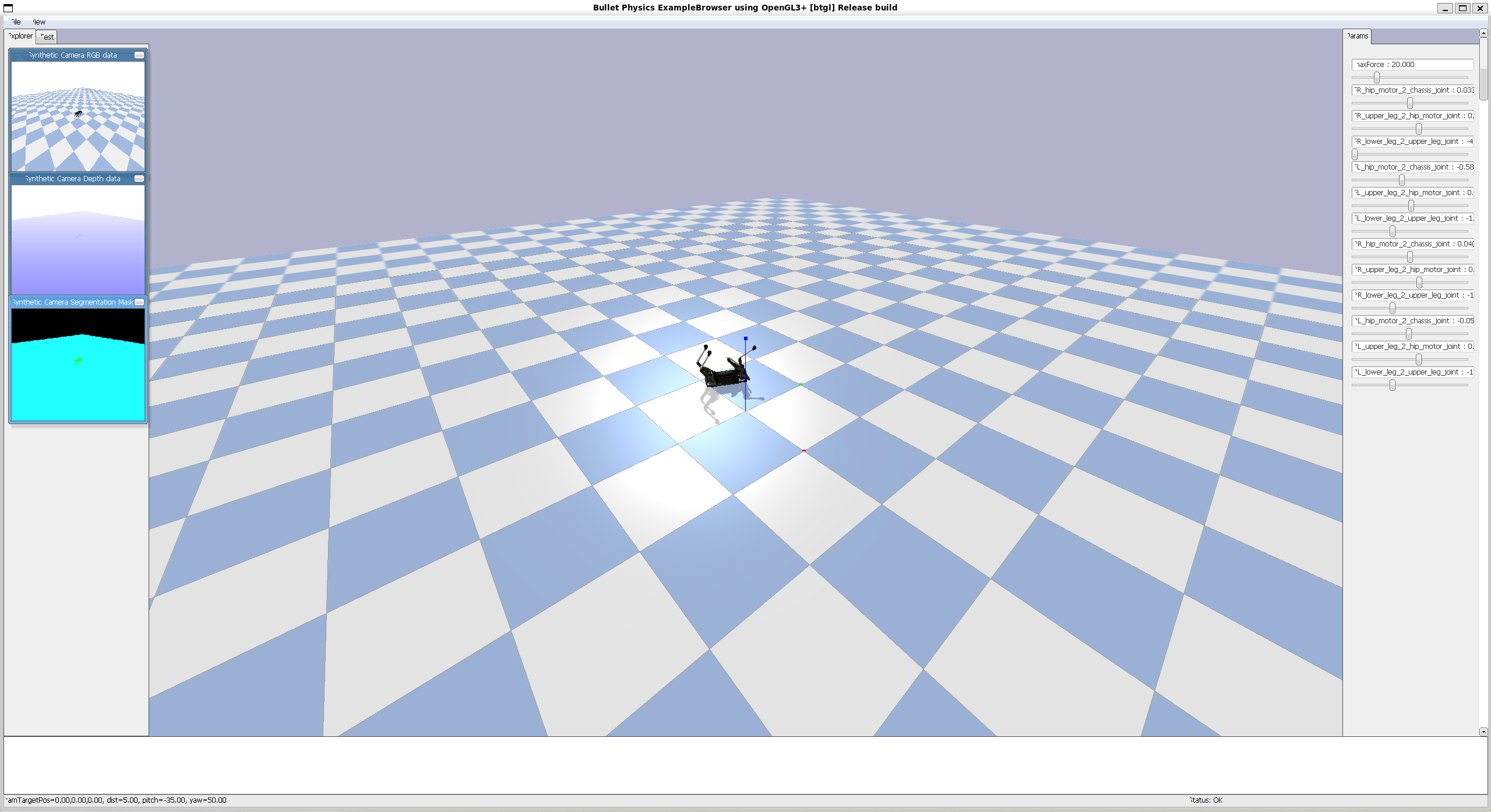
main() 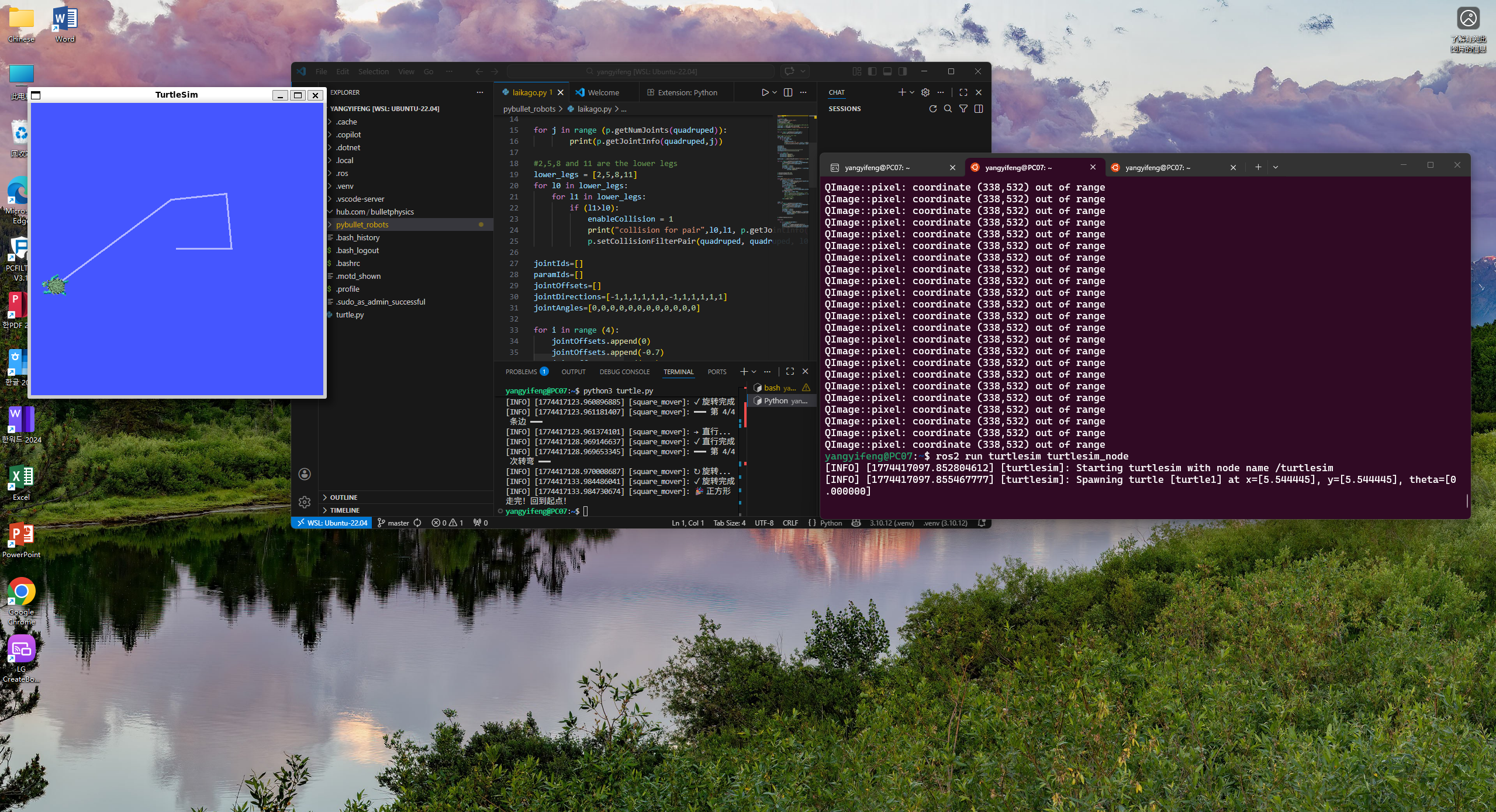 <br> # 机器狗放倒 <br> - python安装和python程序的命令行执行 <br> sudo apt install python <br> cd 程序所在目录 <br> python3 程序名字.py (有时候需要用python) <br> python 的包管理器 pip (有时候需要使用pip3) 安装 <br> sudo apt install python3-pip <br> pip3 install pybullet 安装仿真用的物理引擎库 <br> - 运行机器狗仿真程序 <br> #git clone https://github.com/bulletphysics/pybullet_robots <br> #python3 lakago.py <br> - 运行程序,改关节参数,放(倒)狗(子)