Week3 ROS2基本命令介绍和通信机制基础
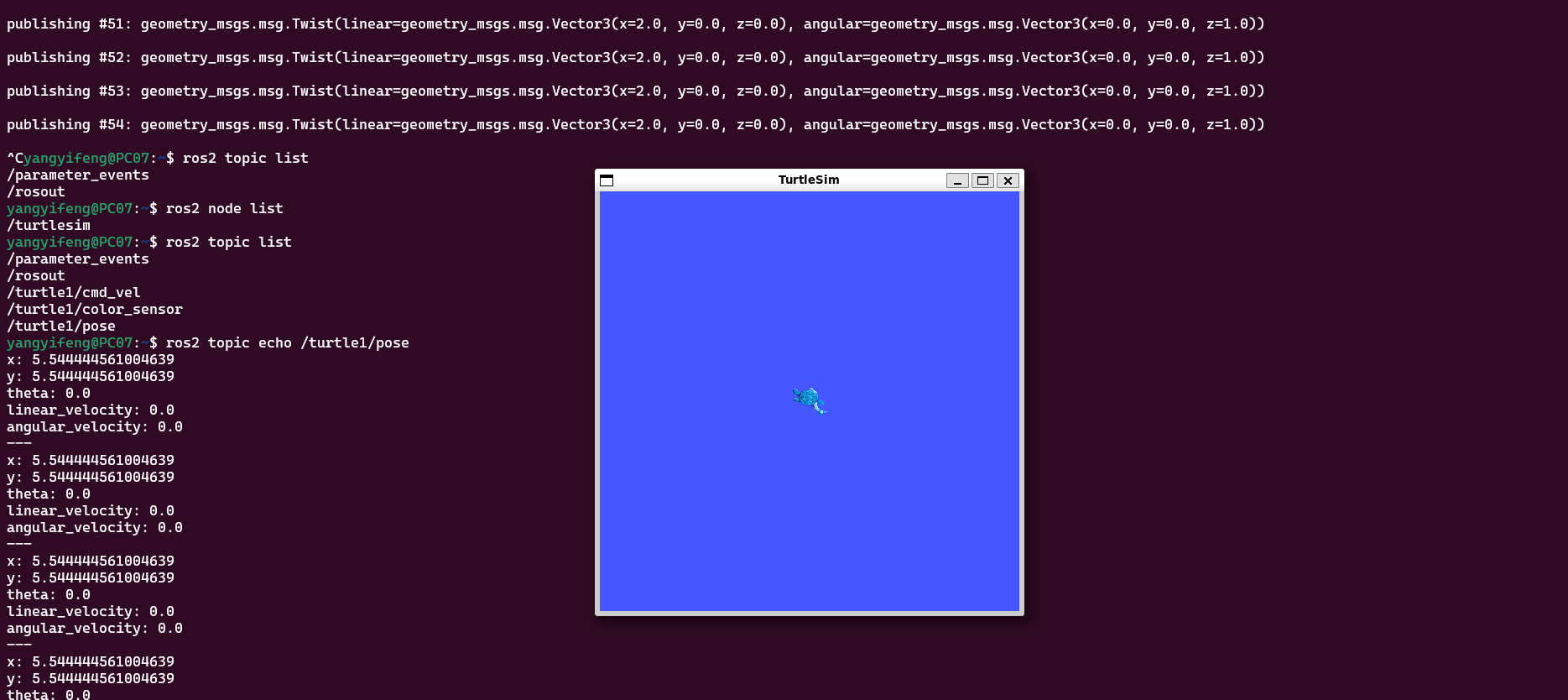
监听话题
监听话题消息
ros2 topic echo <话题名>
示例:监听小乌龟位置
ros2 topic echo /turtle1/pose
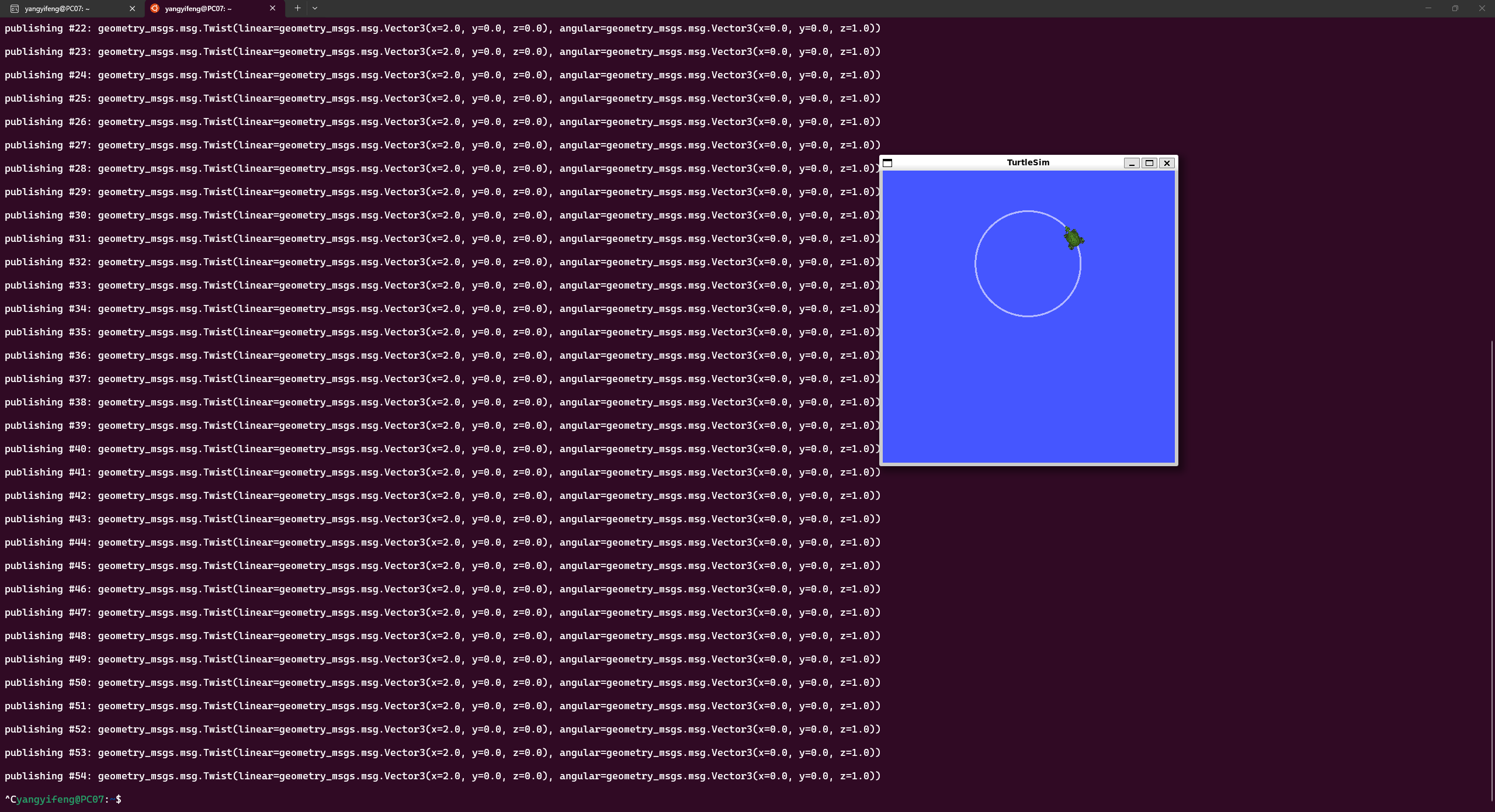
- 实验1:基础画圆
让小乌龟画圆(前进 + 左转)
ros2 topic pub –rate 1 /turtle1/cmd_vel geometry_msgs/Twist \ “{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.0}}”
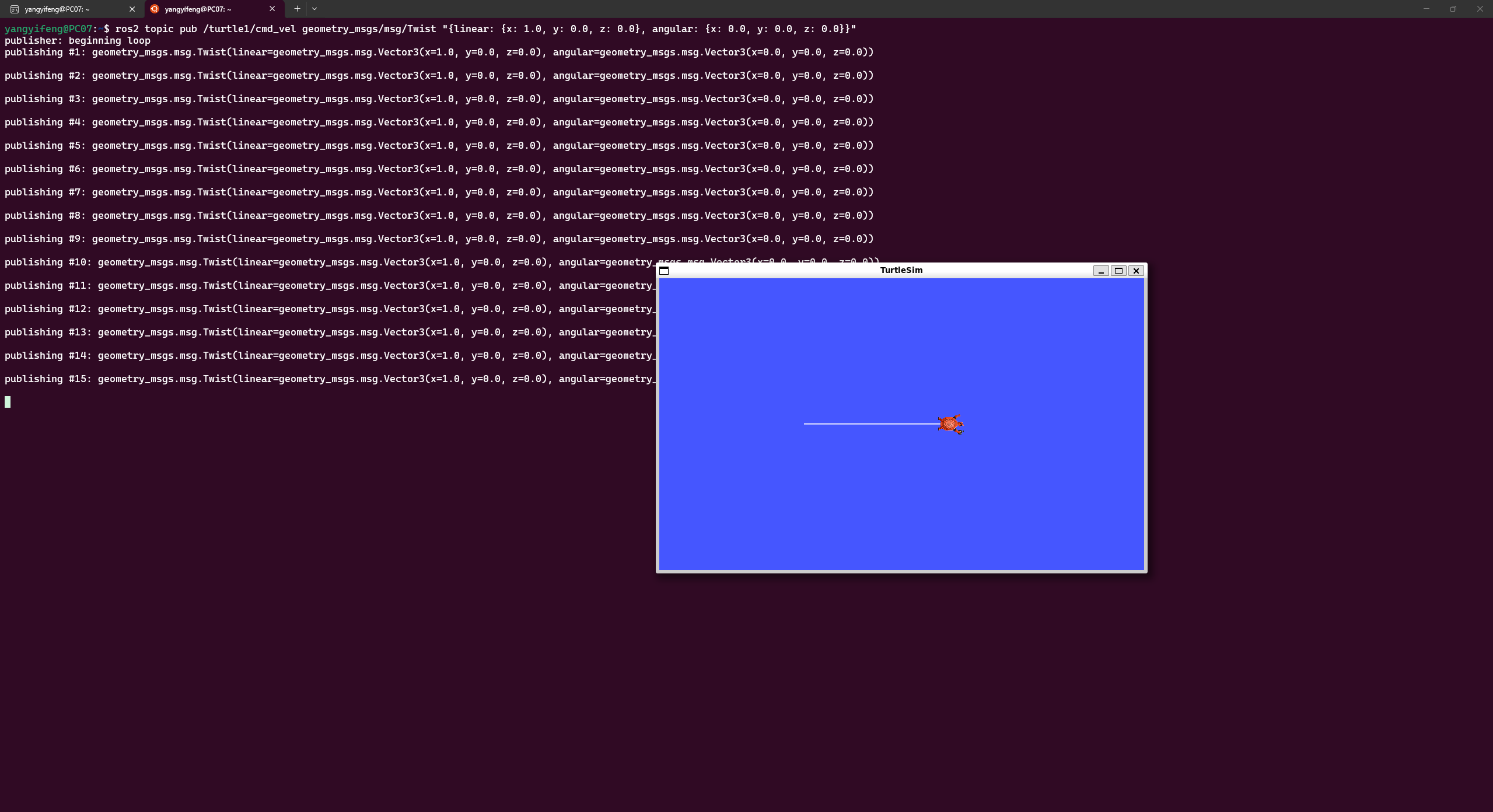
- 试验2:前进命令
让小乌龟前进
ros2 topic pub <话题> <消息类型> <数据>
ros2 topic pub /turtle1/cmd_vel geometry_msgs/Twist \ "{linear: {x: 1.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 0.0}}"
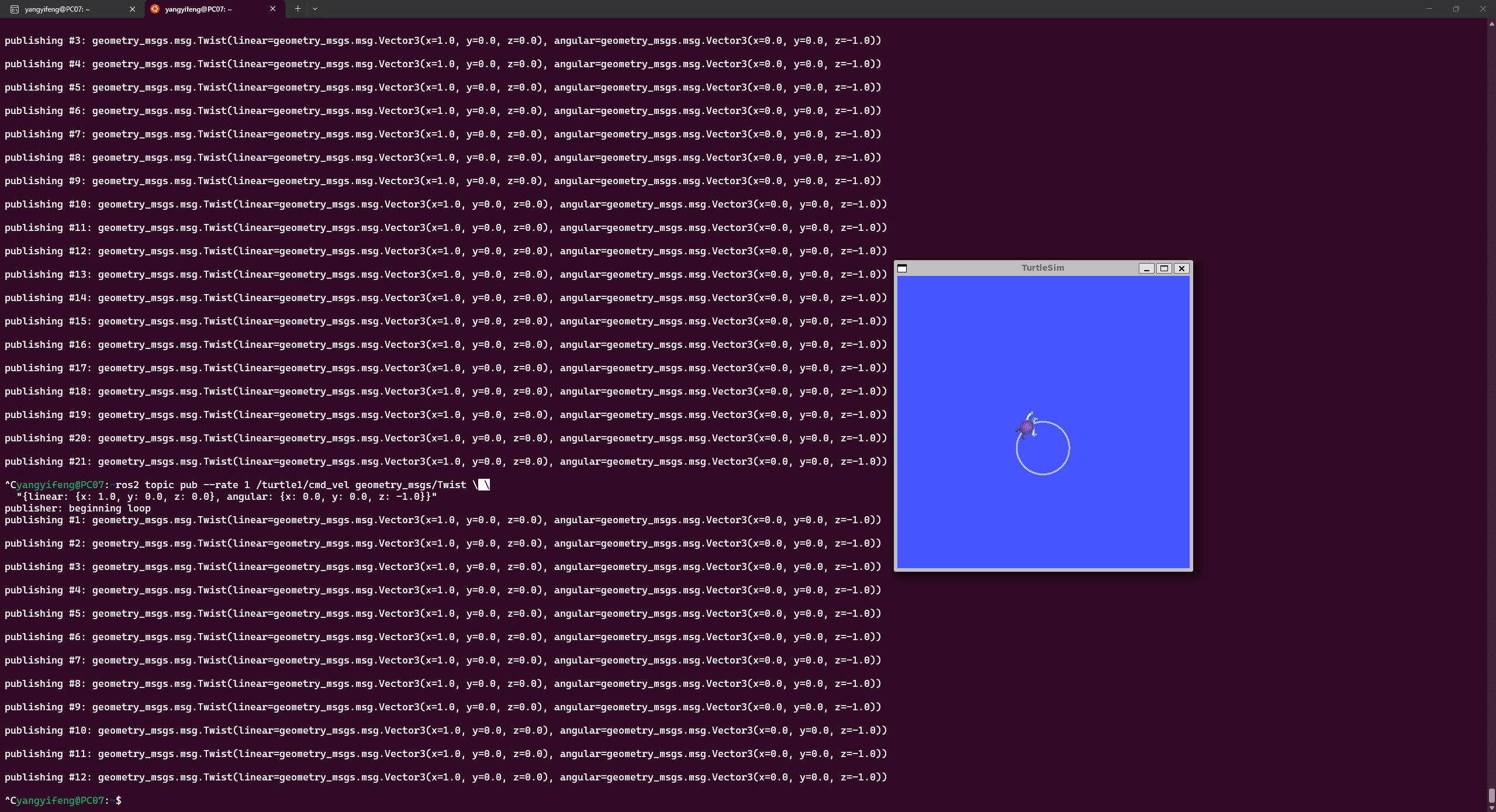
 - 实验3:顺时针画圆
顺时针转
ros2 topic pub –rate 1 /turtle1/cmd_vel geometry_msgs/Twist
“{linear: {x: 1.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: -1.0}}”